publications
For an up-to-date list, please see my Google Scholar.
2026
-
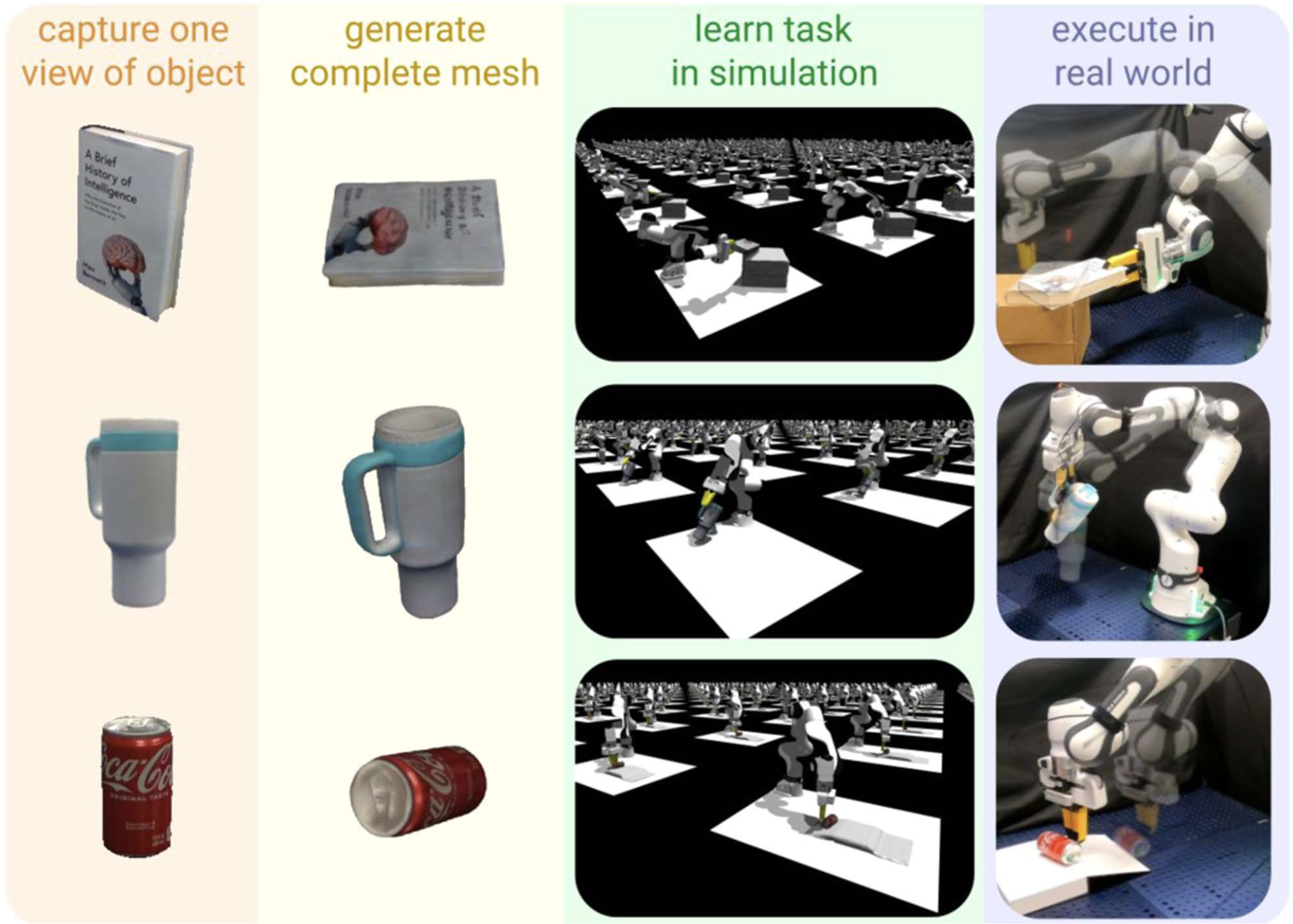 ZeroBot: Learning From Scratch in Minutes With Generative Real2SimIEEE Robotics and Automation Letters, 2026
ZeroBot: Learning From Scratch in Minutes With Generative Real2SimIEEE Robotics and Automation Letters, 2026 -
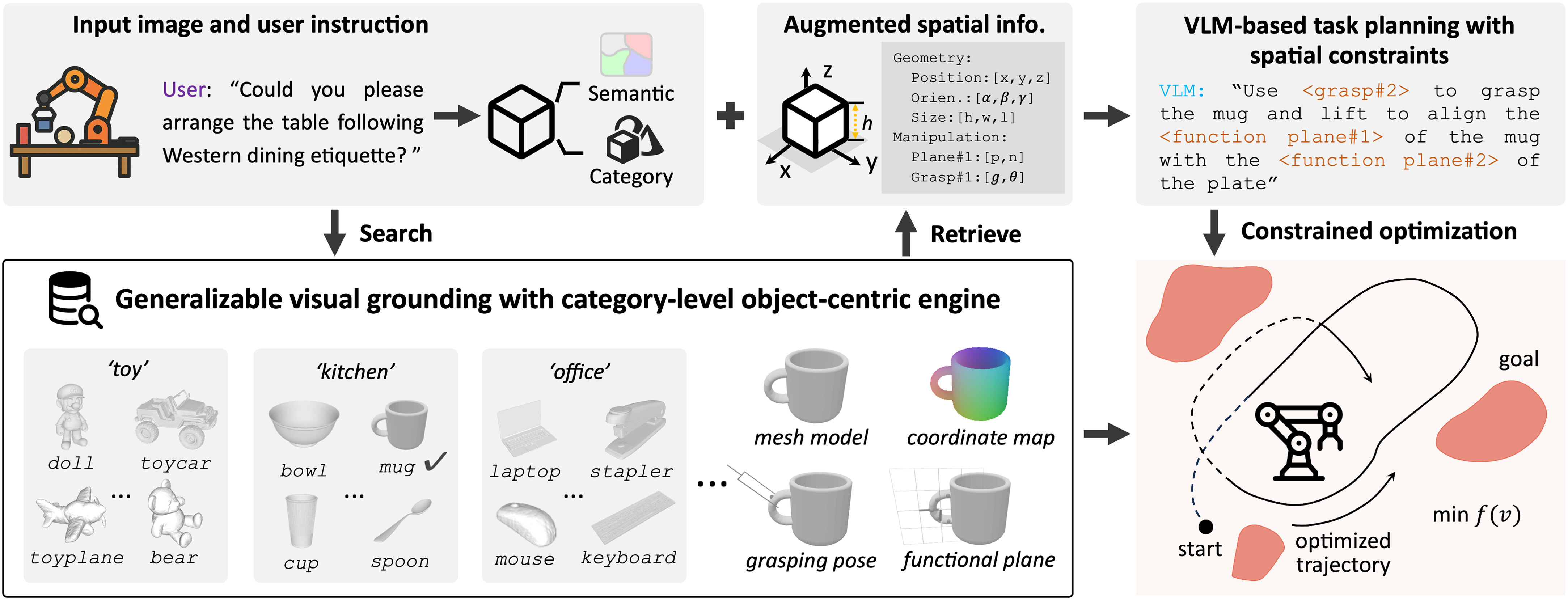 A retrieval-augmented framework enabling VLM spatial awareness for object-centric robot manipulationScience Robotics, 2026
A retrieval-augmented framework enabling VLM spatial awareness for object-centric robot manipulationScience Robotics, 2026


2024
-
-
 Green Screen Augmentation Enables Scene Generalisation in Robotic ManipulationarXiv preprint arXiv:2407.07868, 2024
Green Screen Augmentation Enables Scene Generalisation in Robotic ManipulationarXiv preprint arXiv:2407.07868, 2024 -
-
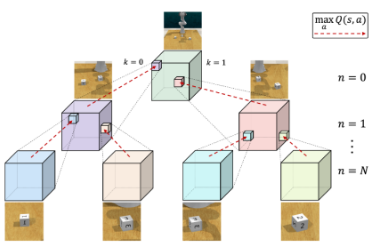
 Continuous Control with Coarse-to-fine Reinforcement LearningConference on Robot Learning, 2024
Continuous Control with Coarse-to-fine Reinforcement LearningConference on Robot Learning, 2024 -
 Render and Diffuse: Aligning Image and Action Spaces for Diffusion-based Behaviour CloningRobotics: Science and Systems, 2024
Render and Diffuse: Aligning Image and Action Spaces for Diffusion-based Behaviour CloningRobotics: Science and Systems, 2024 -
-
 Hierarchical Diffusion Policy for Kinematics-Aware Multi-Task Robotic ManipulationConference on Computer Vision and Pattern Recognition, 2024
Hierarchical Diffusion Policy for Kinematics-Aware Multi-Task Robotic ManipulationConference on Computer Vision and Pattern Recognition, 2024 -
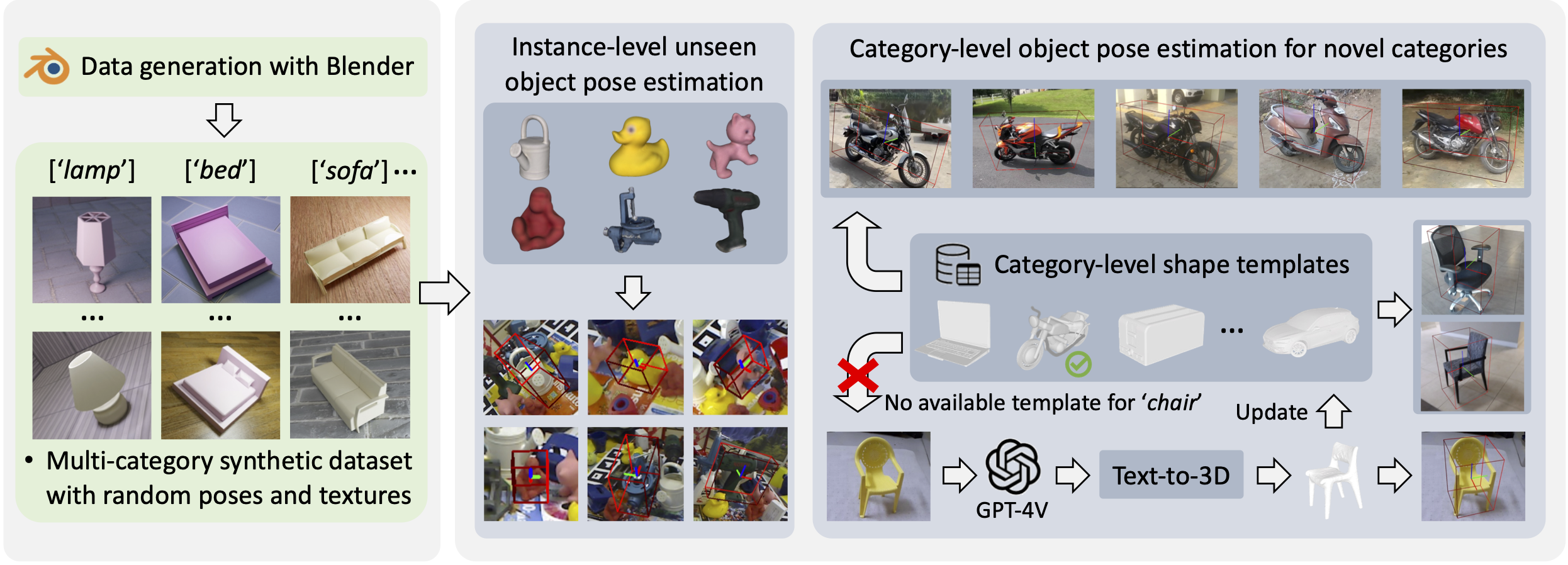 Vision Foundation Model Enables Generalizable Object Pose EstimationConference on Neural Information Processing Systems, 2024
Vision Foundation Model Enables Generalizable Object Pose EstimationConference on Neural Information Processing Systems, 2024








2023
-

-
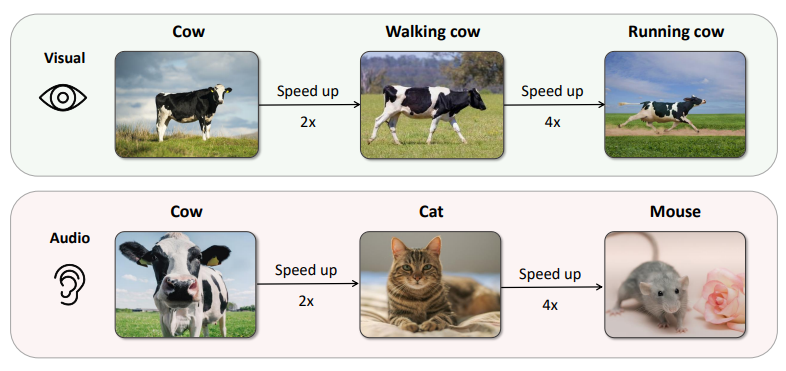 Speed Co-Augmentation for Unsupervised Audio-Visual Pre-trainingarXiv preprint arXiv:2309.13942, 2023
Speed Co-Augmentation for Unsupervised Audio-Visual Pre-trainingarXiv preprint arXiv:2309.13942, 2023 -
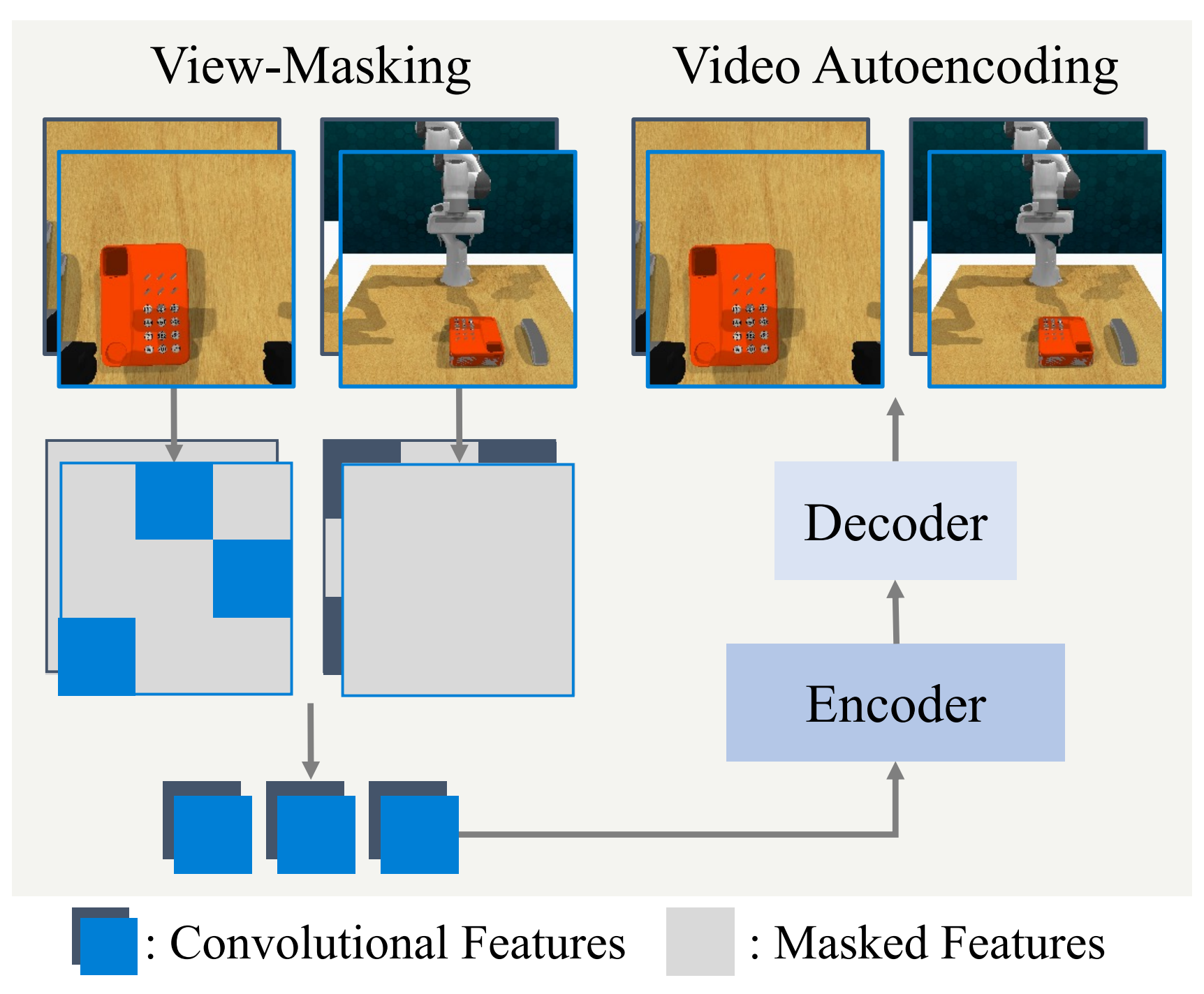 Multi-view masked world models for visual robotic manipulationInternational Conference on Machine Learning, 2023
Multi-view masked world models for visual robotic manipulationInternational Conference on Machine Learning, 2023 -
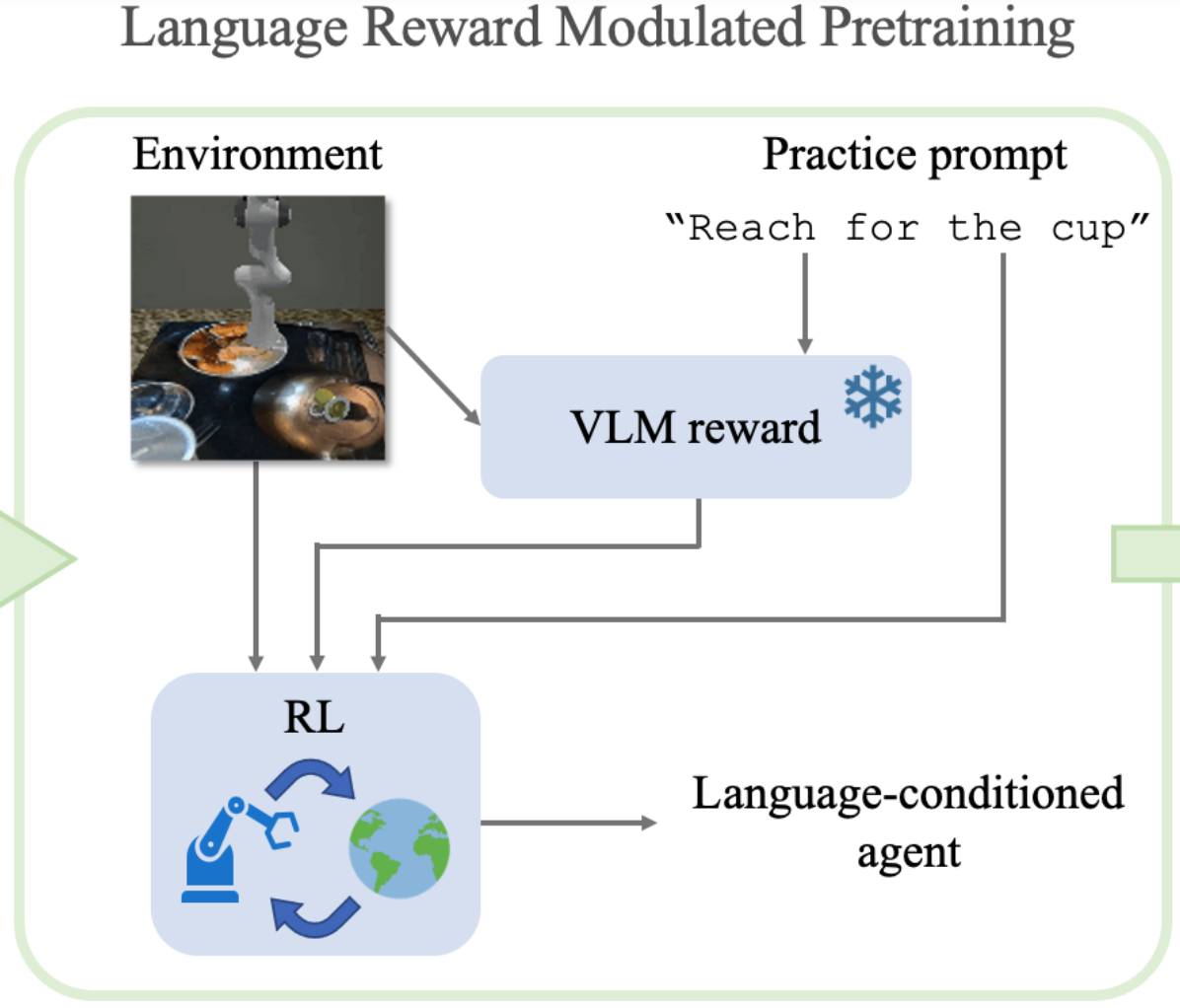 Language reward modulation for pretraining reinforcement learningarXiv preprint arXiv:2308.12270, 2023
Language reward modulation for pretraining reinforcement learningarXiv preprint arXiv:2308.12270, 2023 -
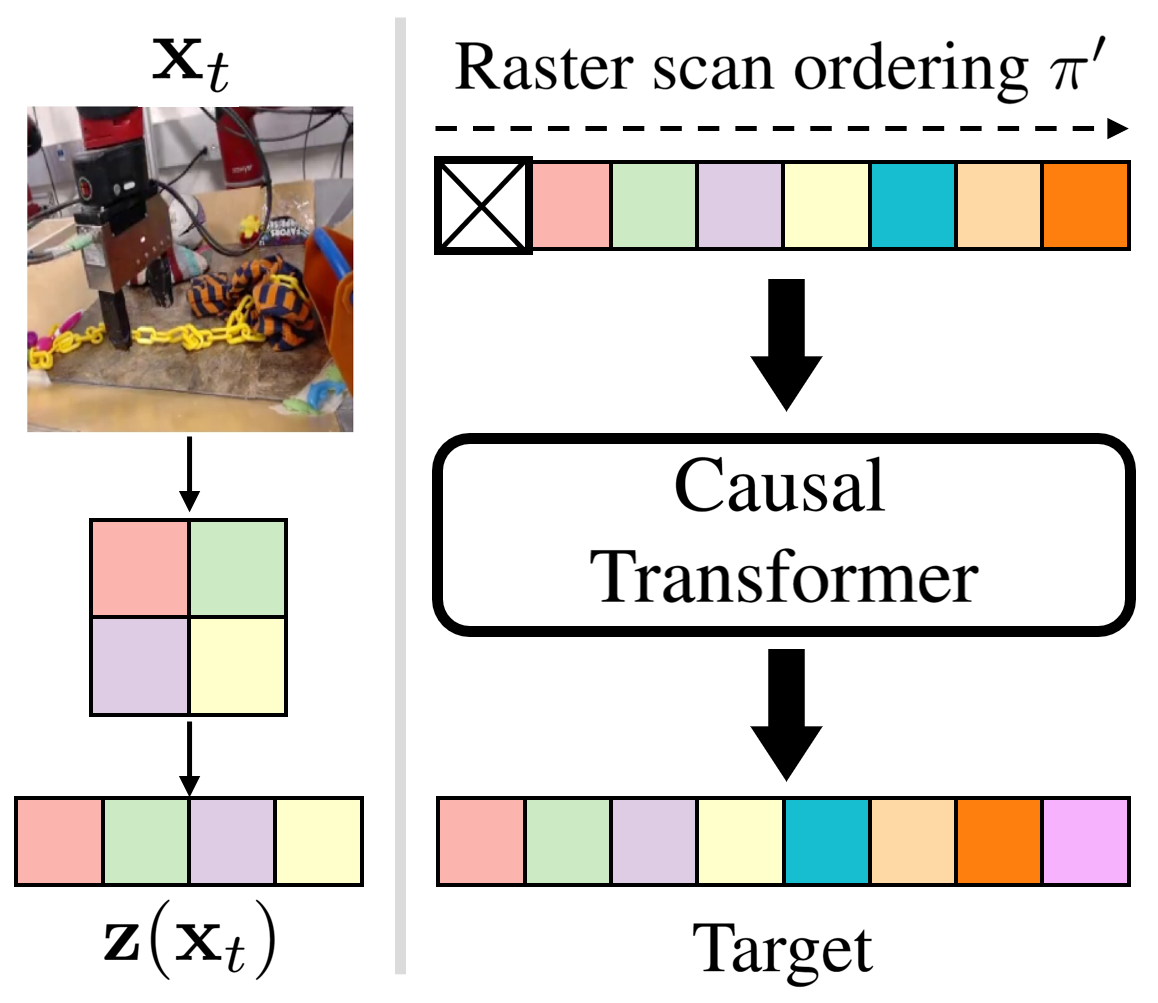
 Temporally consistent transformers for video generationInternational Conference on Machine Learning, 2023
Temporally consistent transformers for video generationInternational Conference on Machine Learning, 2023 -
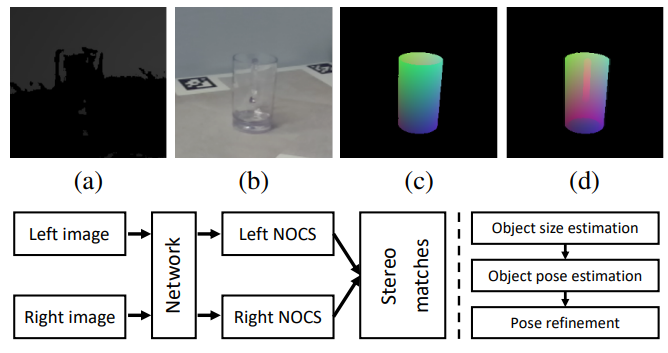 Stereopose: Category-level 6d transparent object pose estimation from stereo images via back-view nocsIEEE International Conference on Robotics and Automation, 2023
Stereopose: Category-level 6d transparent object pose estimation from stereo images via back-view nocsIEEE International Conference on Robotics and Automation, 2023






2022
-
 Sim-to-Real via Sim-to-Seg: End-to-end Off-road Autonomous Driving Without Real DataConference on Robot Learning, 2022
Sim-to-Real via Sim-to-Seg: End-to-end Off-road Autonomous Driving Without Real DataConference on Robot Learning, 2022 -
-
-
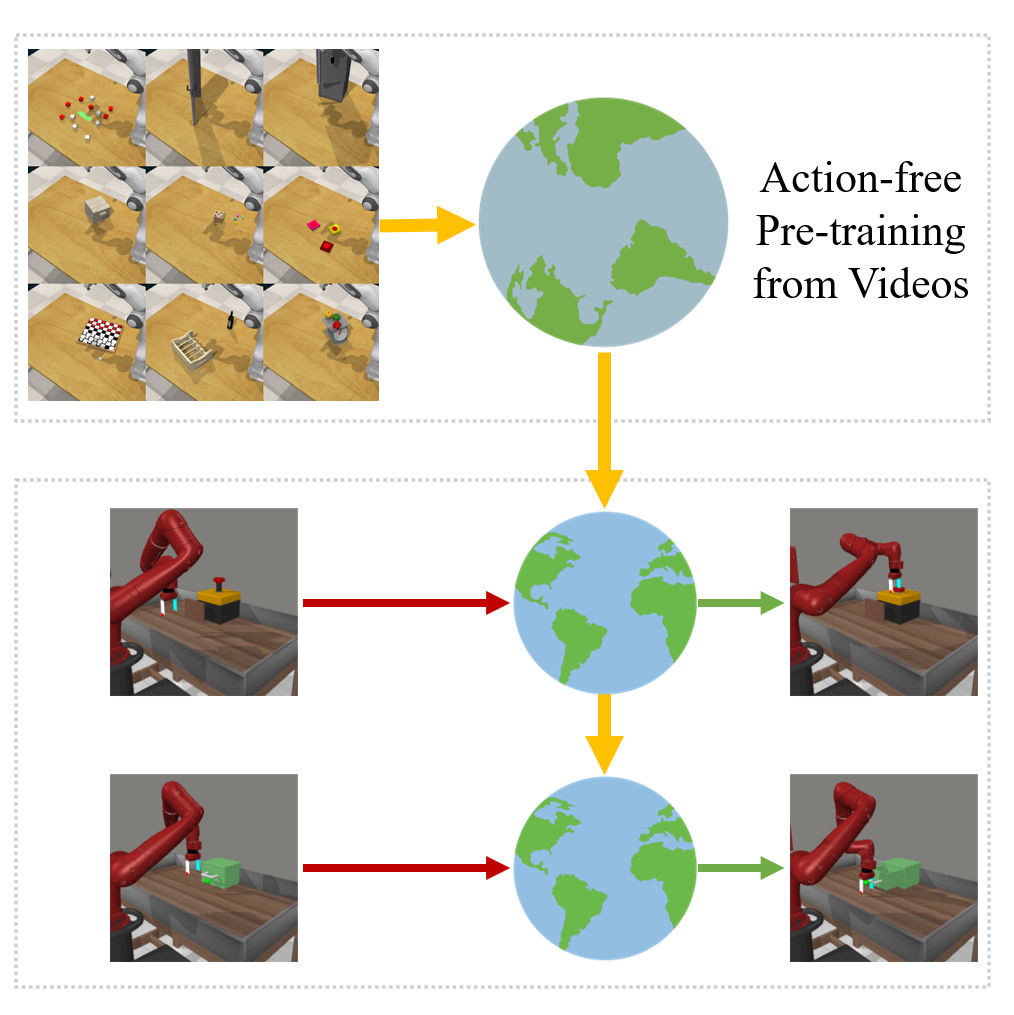 Reinforcement learning with action-free pre-training from videosInternational Conference on Machine Learning, 2022
Reinforcement learning with action-free pre-training from videosInternational Conference on Machine Learning, 2022 -
 Patch-based Object-centric Transformers for Efficient Video GenerationarXiv preprint arXiv:2206.04003, 2022
Patch-based Object-centric Transformers for Efficient Video GenerationarXiv preprint arXiv:2206.04003, 2022 -
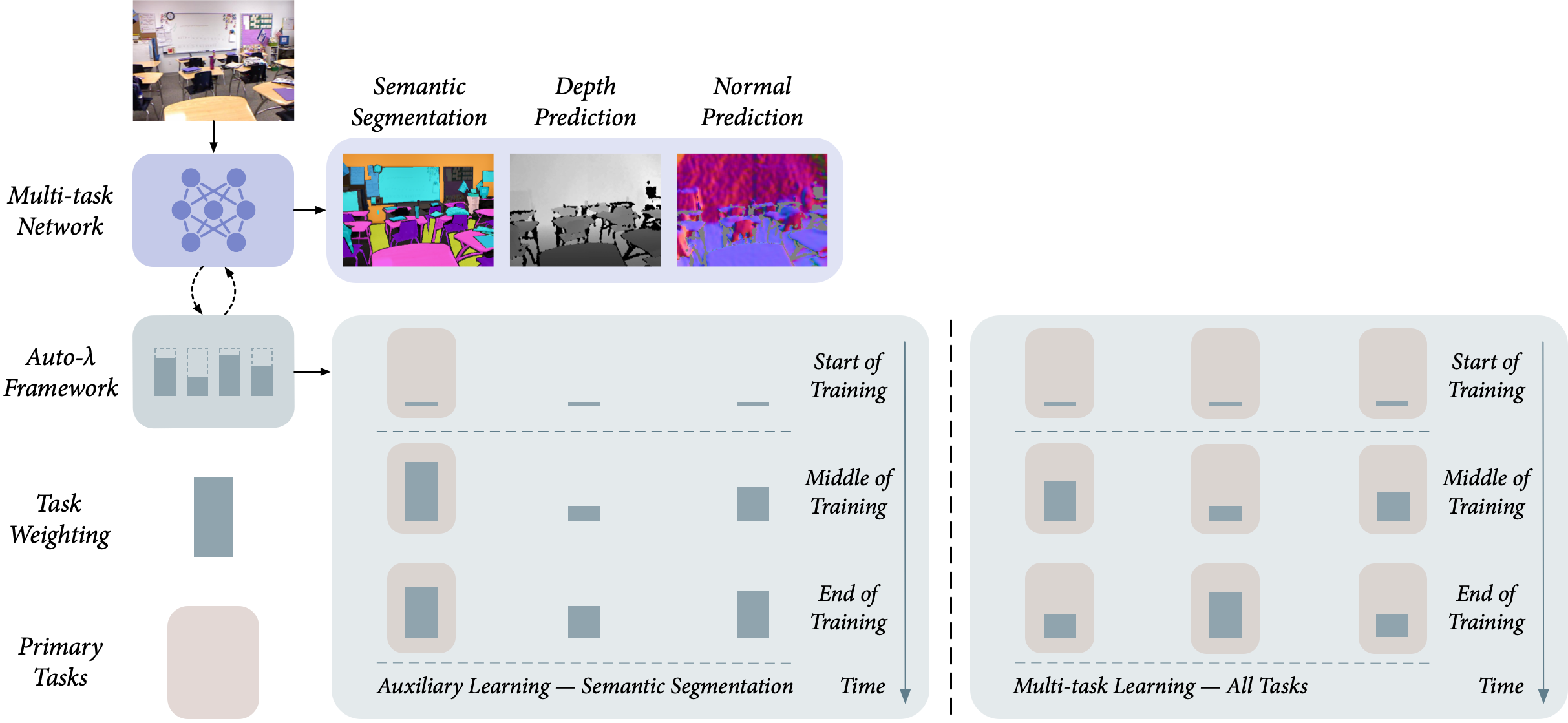 Auto-Lambda: Disentangling Dynamic Task RelationshipsTransactions on Machine Learning Research, 2022
Auto-Lambda: Disentangling Dynamic Task RelationshipsTransactions on Machine Learning Research, 2022 -
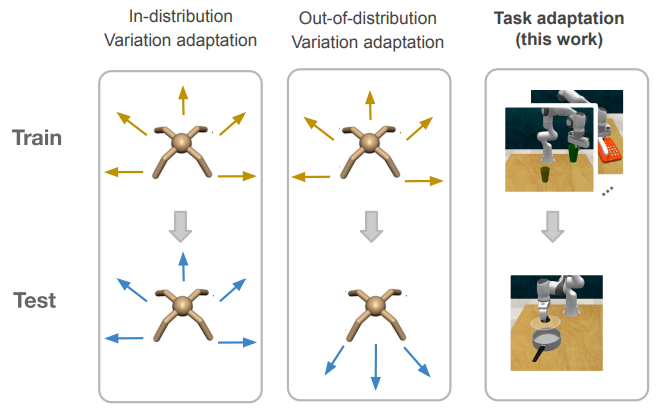 On the Effectiveness of Fine-tuning Versus Meta-reinforcement LearningConference on Neural Information Processing Systems, 2022
On the Effectiveness of Fine-tuning Versus Meta-reinforcement LearningConference on Neural Information Processing Systems, 2022 -
-
-
 ReorientBot: Learning Object Reorientation for Specific-Posed PlacementIEEE International Conference on Robotics and Automation, 2022
ReorientBot: Learning Object Reorientation for Specific-Posed PlacementIEEE International Conference on Robotics and Automation, 2022 -
 SafePicking: Learning safe object extraction via object-level mappingIEEE International Conference on Robotics and Automation, 2022
SafePicking: Learning safe object extraction via object-level mappingIEEE International Conference on Robotics and Automation, 2022 -
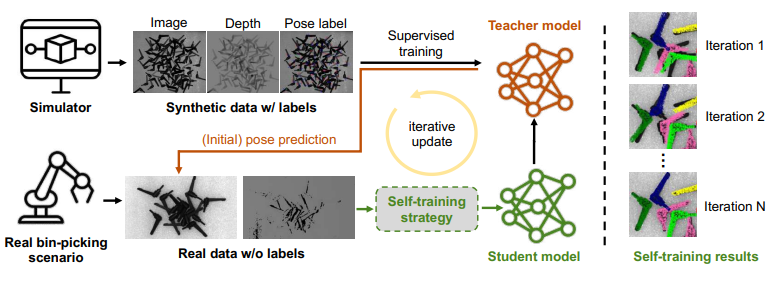 Sim-to-Real 6D Object Pose Estimation via Iterative Self-training for Robotic Bin-pickingEuropean Conference on Computer Vision, 2022
Sim-to-Real 6D Object Pose Estimation via Iterative Self-training for Robotic Bin-pickingEuropean Conference on Computer Vision, 2022 -
 HARP: Autoregressive Latent Video Prediction with High-Fidelity Image GeneratorIEEE International Conference on Image Processing, 2022
HARP: Autoregressive Latent Video Prediction with High-Fidelity Image GeneratorIEEE International Conference on Image Processing, 2022 -
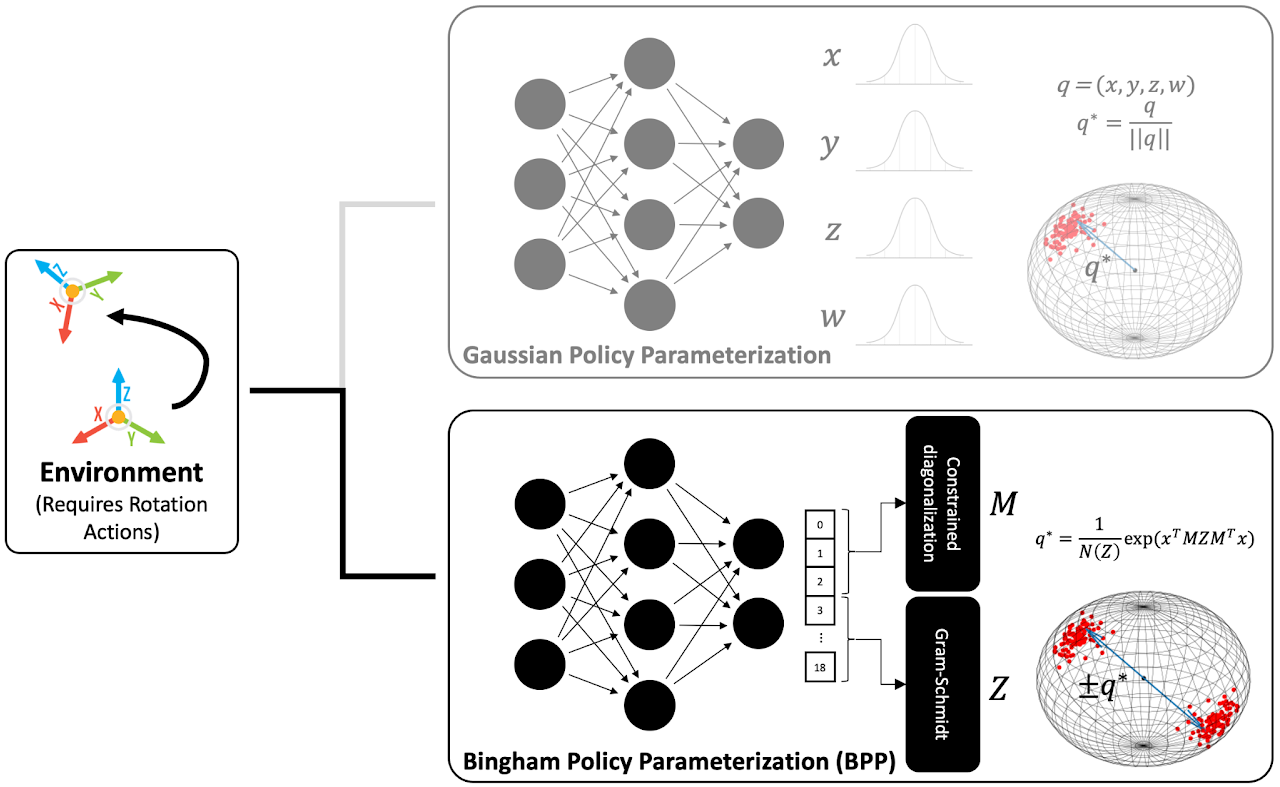 Bingham Policy Parameterization for 3D Rotations in Reinforcement LearningarXiv preprint arXiv:2202.03957, 2022
Bingham Policy Parameterization for 3D Rotations in Reinforcement LearningarXiv preprint arXiv:2202.03957, 2022 -
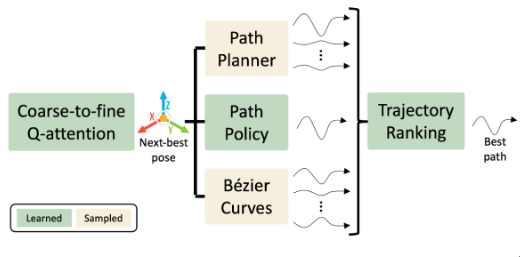
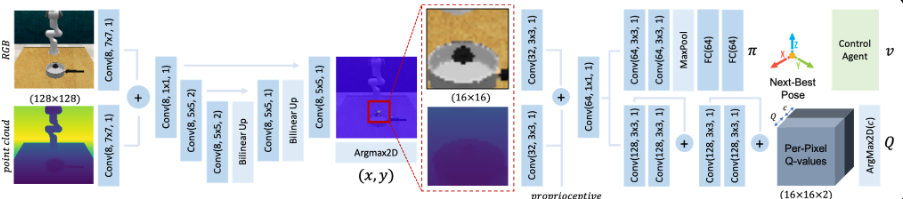
 Coarse-to-Fine Q-attention: Efficient Learning for Visual Robotic Manipulation via DiscretisationConference on Computer Vision and Pattern Recognition, 2022
Coarse-to-Fine Q-attention: Efficient Learning for Visual Robotic Manipulation via DiscretisationConference on Computer Vision and Pattern Recognition, 2022 -
 Q-attention: Enabling Efficient Learning for Vision-based Robotic ManipulationIEEE Robotics and Automation Letters, 2022
Q-attention: Enabling Efficient Learning for Vision-based Robotic ManipulationIEEE Robotics and Automation Letters, 2022
















2021
-
-
 SIMstack: A Generative Shape and Instance Model for Unordered Object StacksIEEE International Conference on Computer Vision, 2021
SIMstack: A Generative Shape and Instance Model for Unordered Object StacksIEEE International Conference on Computer Vision, 2021 -



2020
-
 MoreFusion: Multi-object Reasoning for 6D Pose Estimation from Volumetric FusionConference on Computer Vision and Pattern Recognition, 2020
MoreFusion: Multi-object Reasoning for 6D Pose Estimation from Volumetric FusionConference on Computer Vision and Pattern Recognition, 2020 -
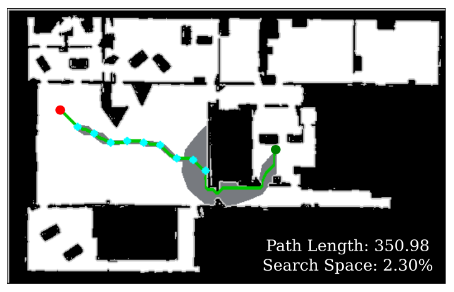
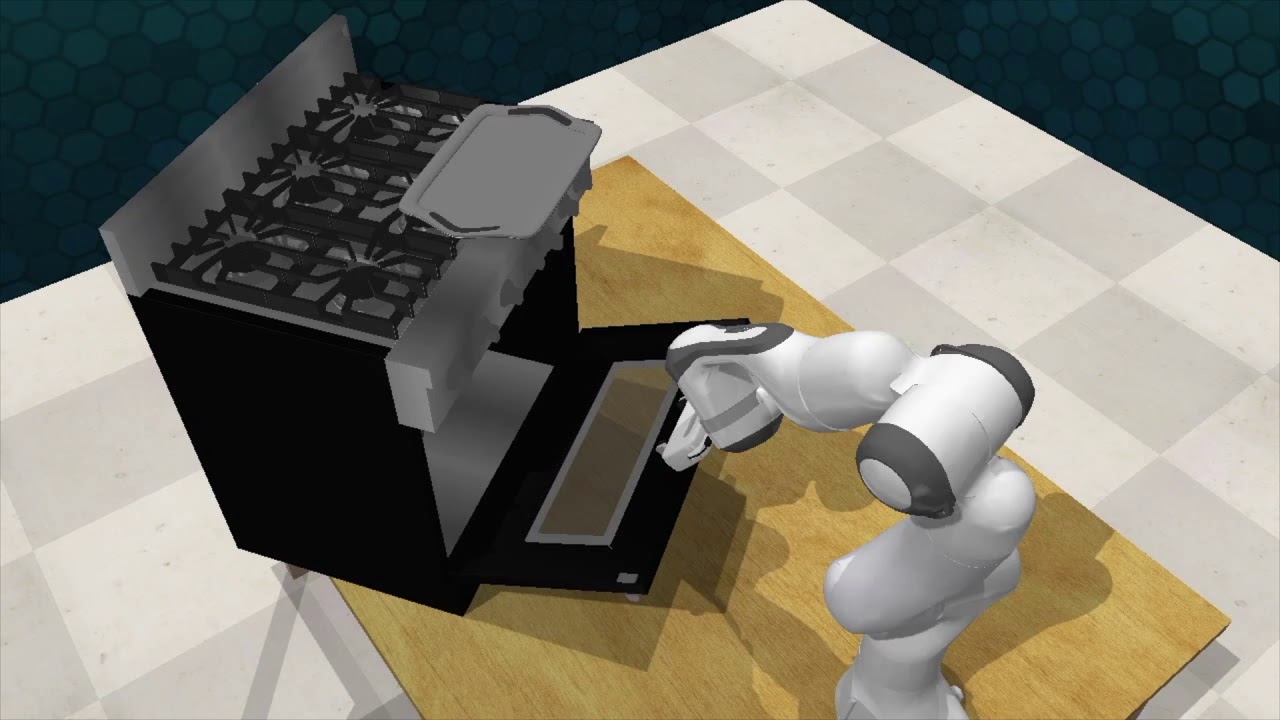 RLBench: The Robot Learning Benchmark & Learning EnvironmentIEEE Robotics and Automation Letters, 2020
RLBench: The Robot Learning Benchmark & Learning EnvironmentIEEE Robotics and Automation Letters, 2020 -
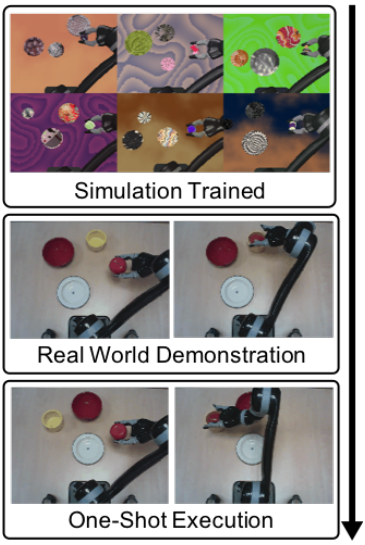
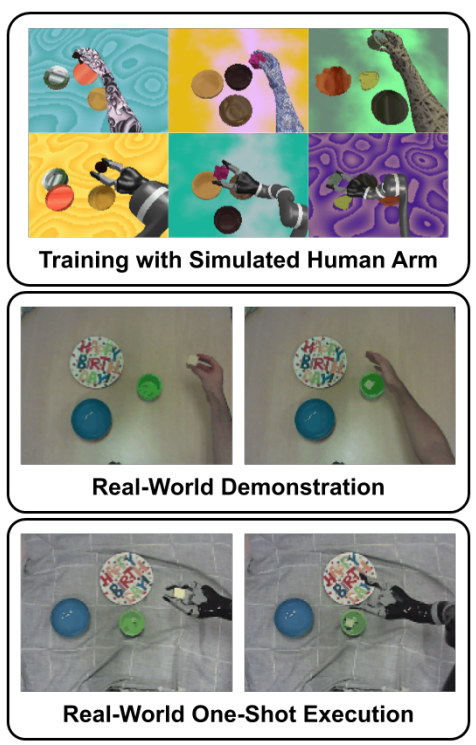 Learning One-Shot Imitation from Humans without HumansIEEE Robotics and Automation Letters, 2020
Learning One-Shot Imitation from Humans without HumansIEEE Robotics and Automation Letters, 2020



2019
-
-
 Sim-to-Real via Sim-to-Sim: Data-efficient Robotic Grasping via Randomized-to-Canonical Adaptation NetworksConference on Computer Vision and Pattern Recognition, 2019
Sim-to-Real via Sim-to-Sim: Data-efficient Robotic Grasping via Randomized-to-Canonical Adaptation NetworksConference on Computer Vision and Pattern Recognition, 2019


2018
-
 Task-Embedded Control Networks for Few-Shot Imitation LearningConference on Robot Learning, 2018
Task-Embedded Control Networks for Few-Shot Imitation LearningConference on Robot Learning, 2018 -
 Sim-to-Real Reinforcement Learning for Deformable Object ManipulationConference on Robot Learning, 2018
Sim-to-Real Reinforcement Learning for Deformable Object ManipulationConference on Robot Learning, 2018


2017
-
 Transferring End-to-End Visuomotor Control from Simulation to Real World for a Multi-Stage TaskConference on Robot Learning, 2017
Transferring End-to-End Visuomotor Control from Simulation to Real World for a Multi-Stage TaskConference on Robot Learning, 2017

2016
-
 3D Simulation for Robot Arm Control with Deep Q-LearningNeurIPS 2016 Workshop (Deep Learning for Action and Interaction), 2016
3D Simulation for Robot Arm Control with Deep Q-LearningNeurIPS 2016 Workshop (Deep Learning for Action and Interaction), 2016
